
Magnetic Encoder Pair Kit for Micro Metal Gearmotors, 12 CPR, 2.7-18V (old version) [pololu-2598]





販売価格: 1,280円(税別)
(税込: 1,408円)
商品詳細
本製品は製造中止のため、再入荷はありません。
このエンコーダーは、Pololu社のHPCBマイクロメタルギアモーター(HPCBモーター端子が大きすぎて、対応するPCBの穴に収まらない)と互換性がありませんが、マイクロメタルギアモーターのLP、MP、HPバージョンと互換性があります。モーターの端子穴を拡大し、すべてのマイクロメタルギアモーターと互換性のある新しいバージョン(3081)がリリースされています。新しいバージョンは機能的に本バージョンと同じで、ドロップインの代替品として機能します。
|
|
概観
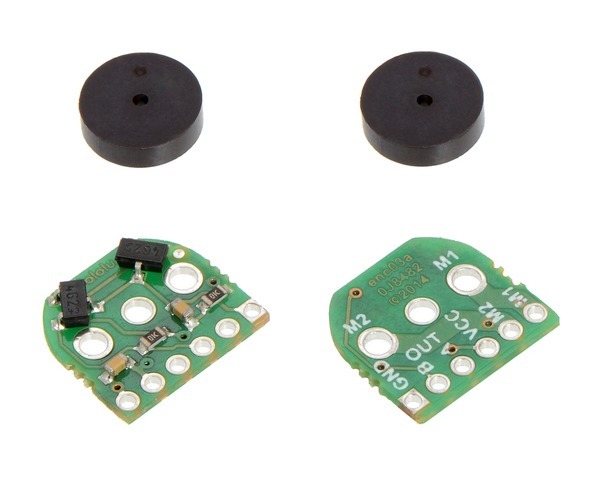
このキットには、2つのデュアルチャネルホール効果センサーボードと2つの6極磁気ディスクが含まれ、これらを使用して、拡張バックシャフトを備えた 2つのマイクロメタルギアモーターに直交エンコーディングを追加できます(モーターはこのキットには含まれていません)。エンコーダボードは、磁気ディスクの回転を感知し、両方のチャネルの両方のエッジをカウントするときに、モーターシャフトの1回転あたり12カウントの分解能を提供します。ギアボックス出力シャフトの1回転あたりのカウントを計算するには、ギア比に12を掛けます。
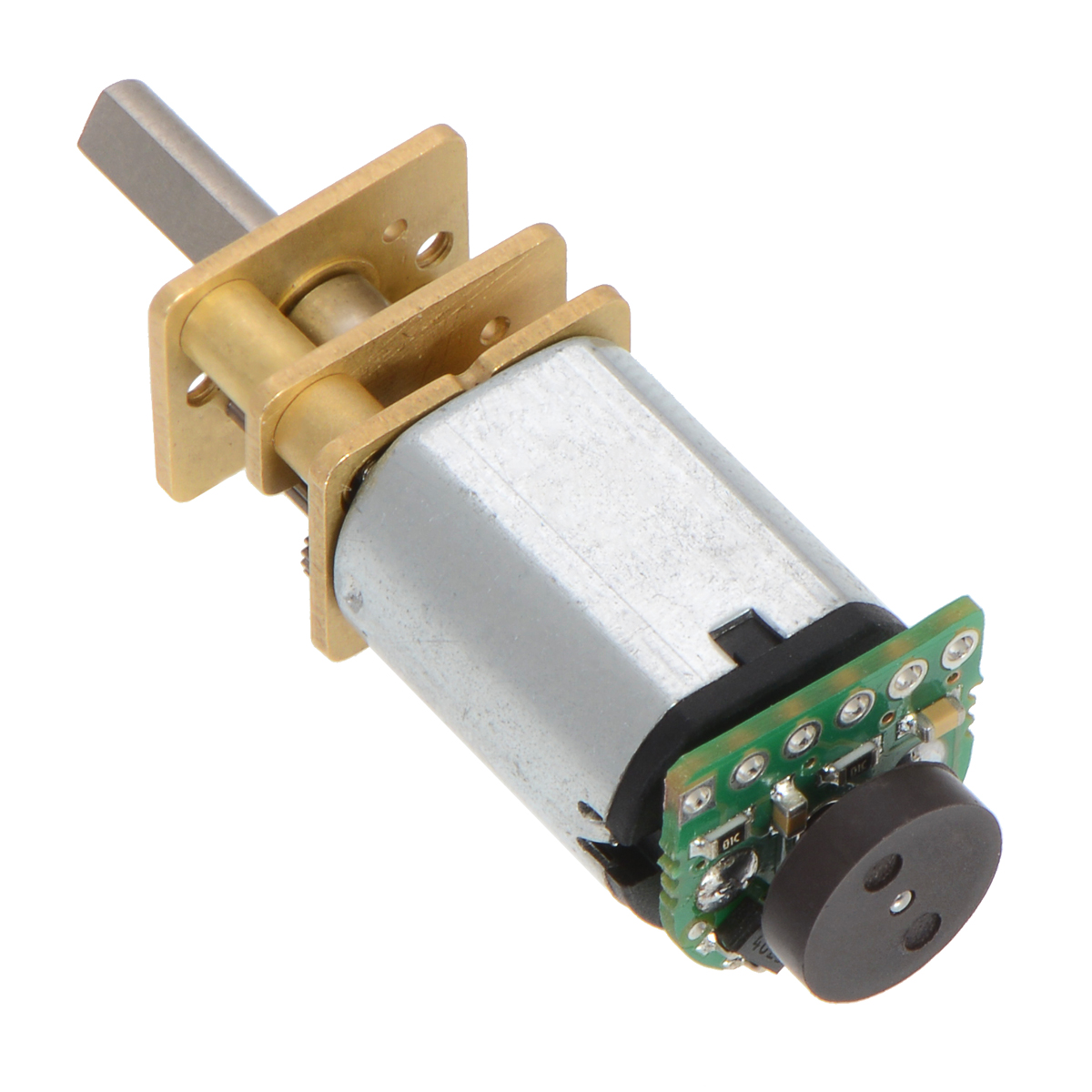 |
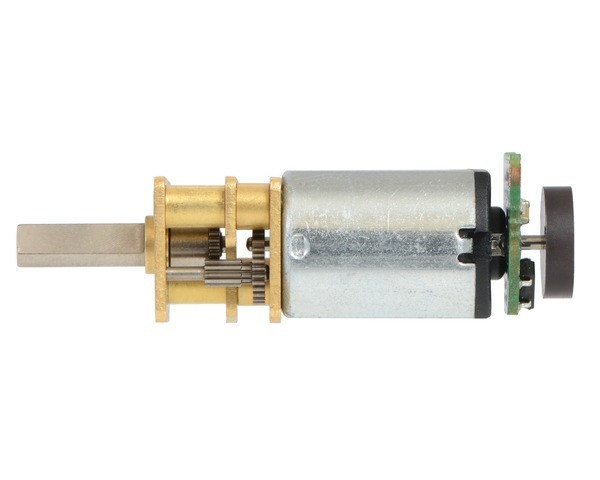
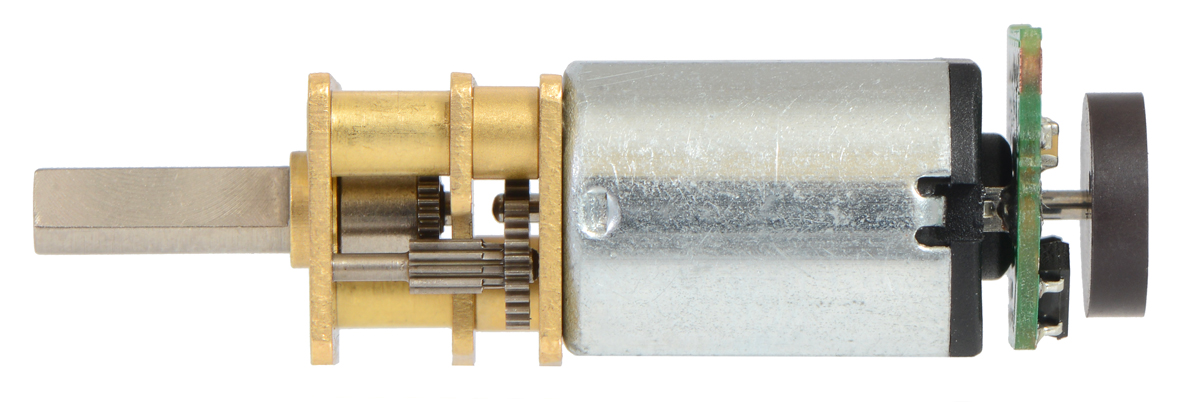
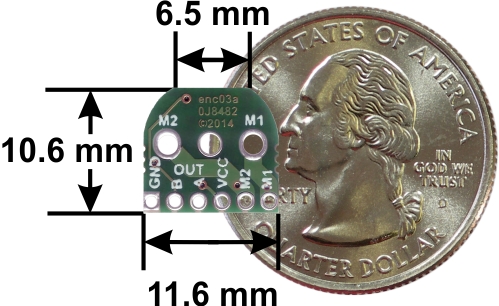
このコンパクトなエンコーダソリューションは、4辺のうち3辺のモーターの12 mm×10 mm断面に適合し、4つめの辺の端から0.6 mmしかはみ出しません(注:最後の面と同じ高さにする必要がある場合は、慎重にボードを少し削って、残りの半分の穴にはんだ付けできます)。アセンブリは、モーター背面のプラスチック製エンドキャップから5 mm突き出ている延長モーターシャフトの端を超えてはみ出しません。
|
|
注:このセンサーシステムは、物理的なエンコーダーの取り付けに慣れているユーザーを対象としています。バックシャフトが延長されたマイクロメタルギアモーターでのみ機能します。
ピン配置とインストール
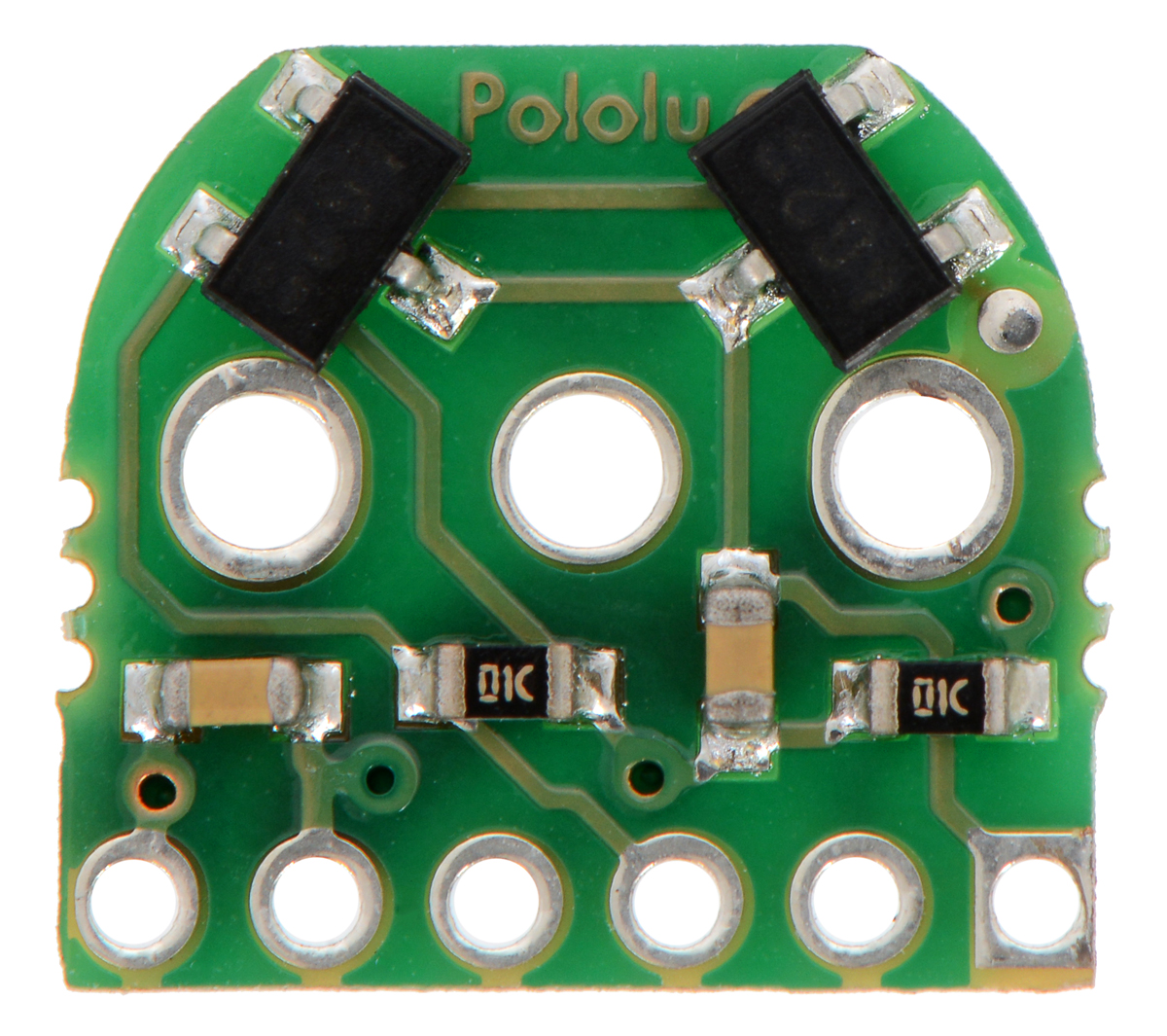
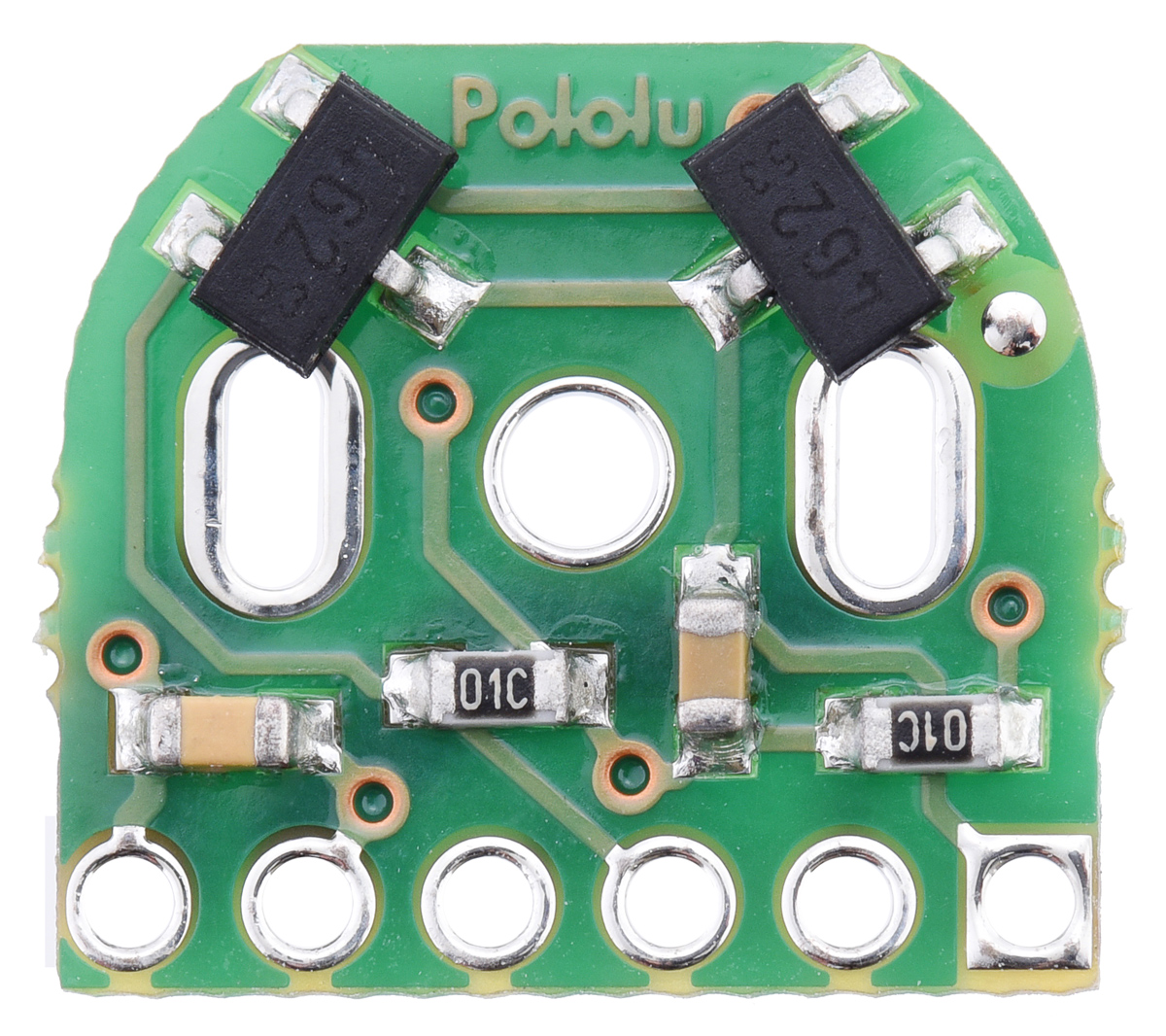
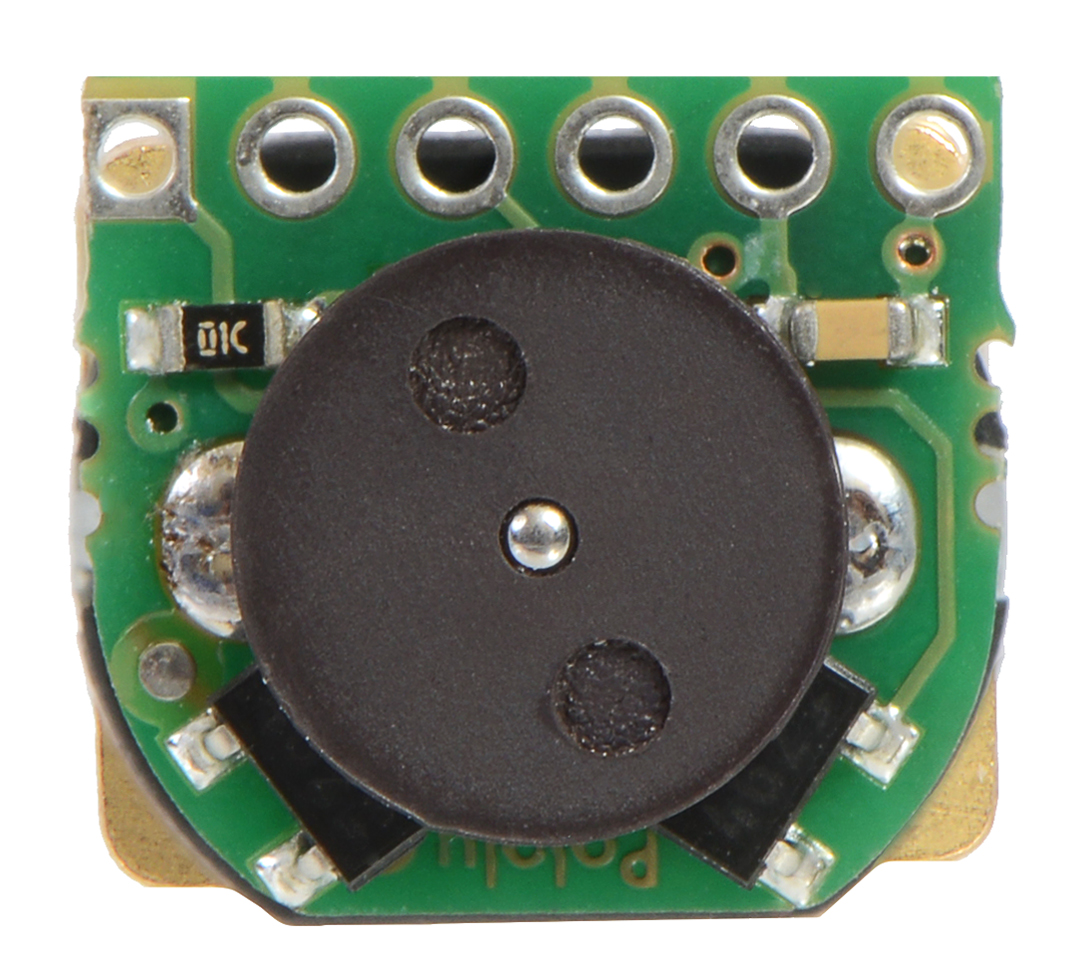
エンコーダボードは、モーターの背面に直接はんだ付けするように設計されており、モーターの背面シャフトが回路基板の中央にある穴から突き出ています。ボードとモーターを適切に位置合わせする1つの方法は、ボードを1つのモーターピンに固定し、ボードが平らで位置が合っている場合にのみ他のピンをはんだ付けすることです。モーターのプラスチック製エンドキャップまたはモーターブラシが変形する可能性がある、モーターピンの長時間の加熱に注意してください。ボードが2つの端子にはんだ付けされると、モーターのリード線がボードの端に沿ってM1およびM2パッドに接続されます。残りの4つのパッドは、センサーに電力を供給し、2つの直交出力にアクセスするために使用されます。
|
|

センサーは、VCCピンとGNDピンを介して給電されます。VCCは2.7 V〜18 Vであり、直交出力AおよびBはデジタル信号であり、印加される磁場に応じて、センサーによってLow(0 V)に駆動されるか、10kΩプルアップ抵抗を介してVCCにプルされます。センサーのコンパレーターにはヒステリシスが組み込まれているため、モーターが遷移点の近くで停止した場合のスプリアス信号を防止できます。
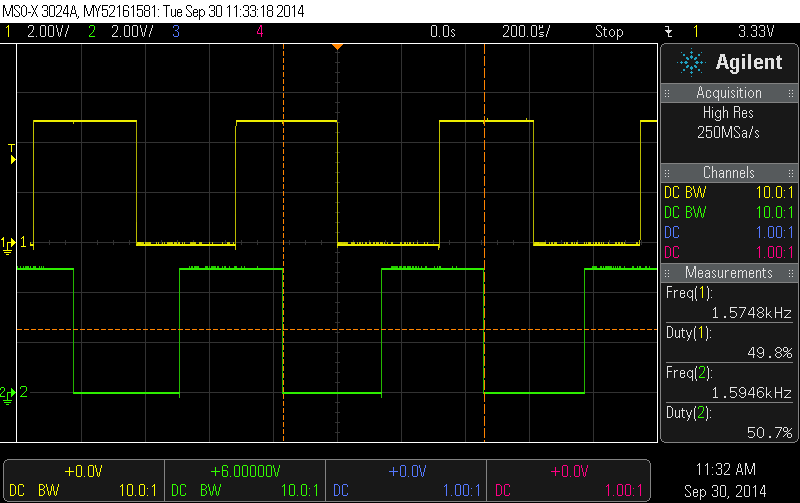 |
6 Vで動作する高出力(HP)マイクロメタルギアモーターの磁気エンコーダーのエンコーダーAおよびB出力。 |
|---|
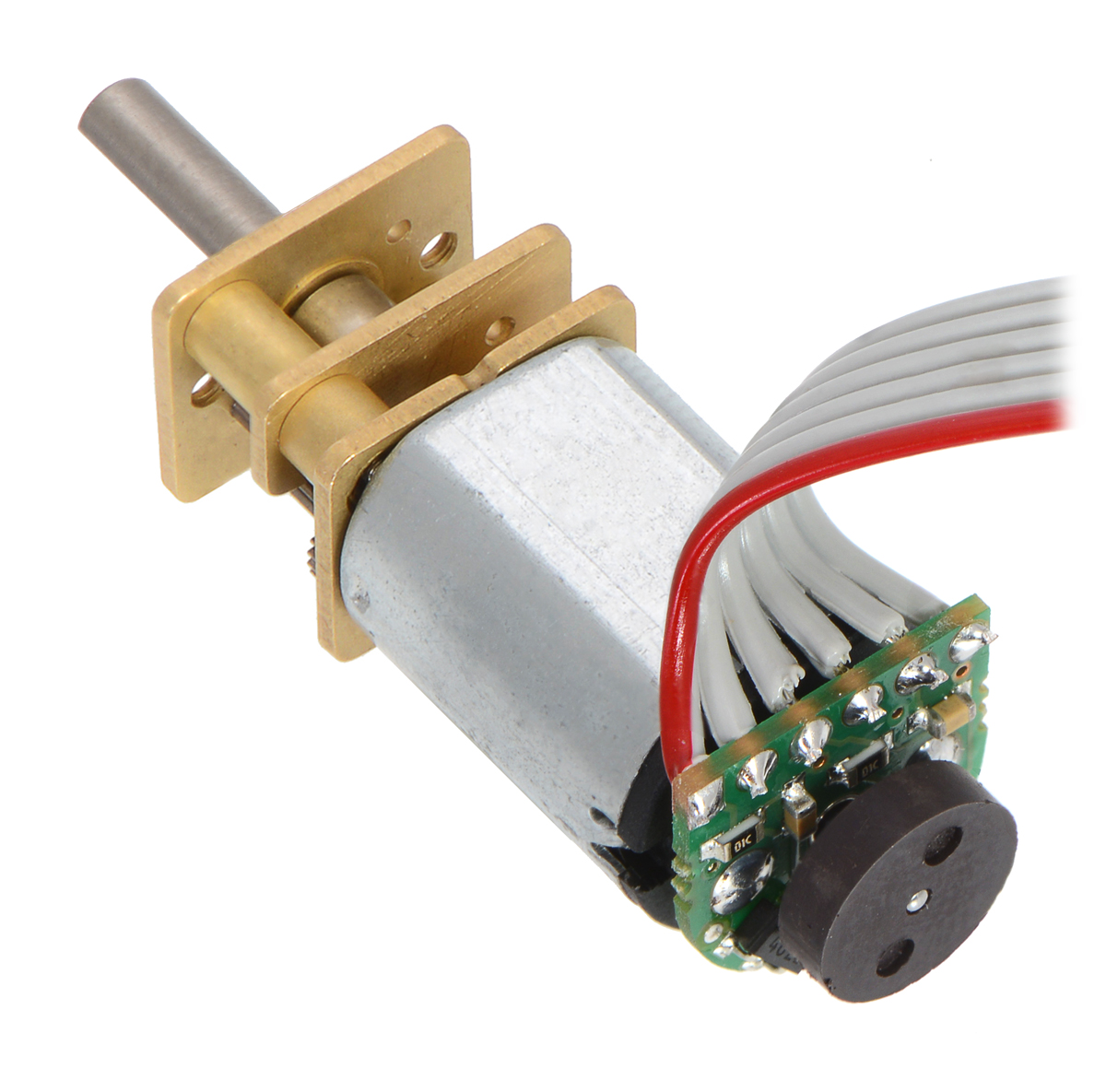
ボードの6つのパッドは2 mmピッチなので、一般的な0.1インチコネクタでは動作しません。ボードに接続するための1つのオプションは、以下の例のように、個々のワイヤーをはんだ付けすることです。
 |
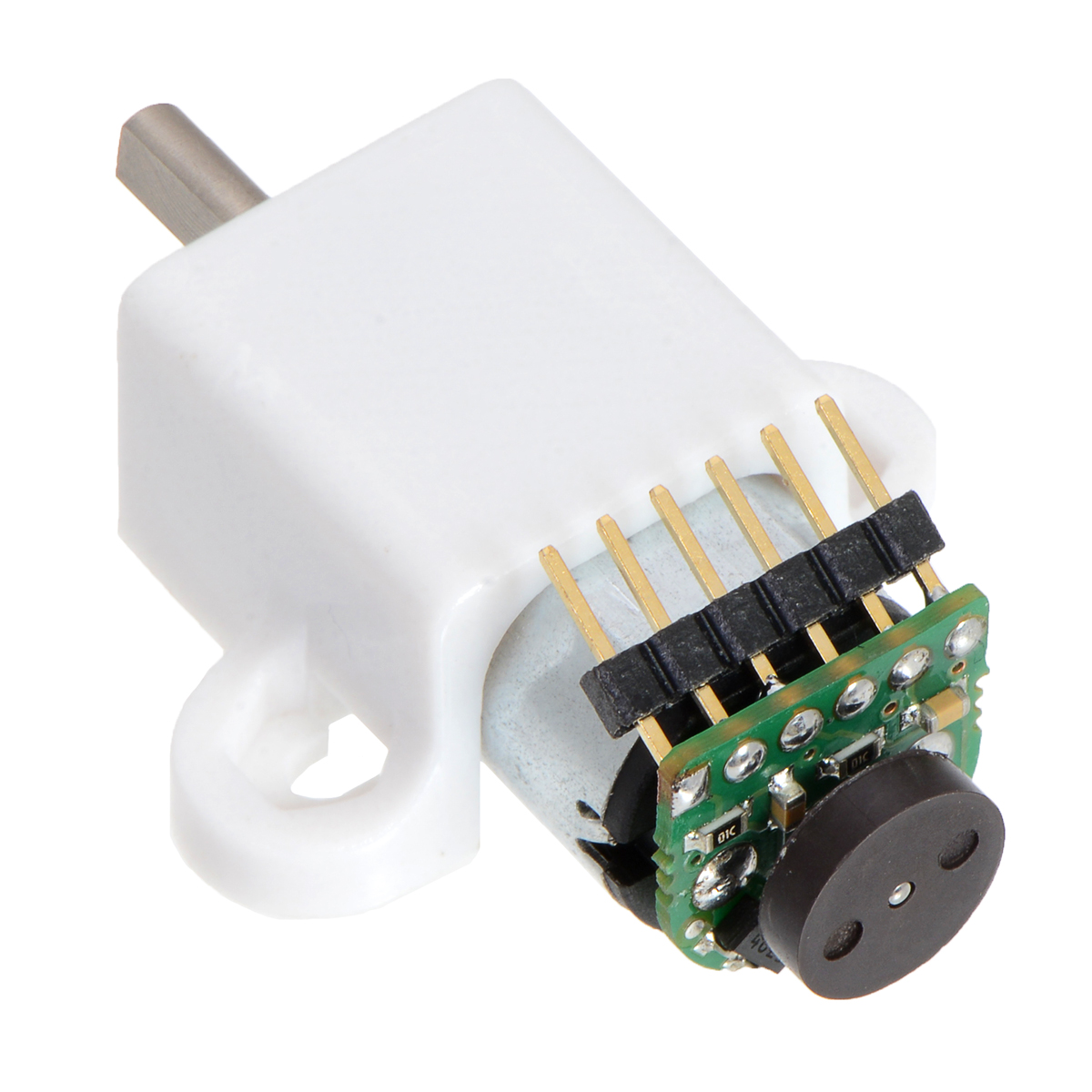
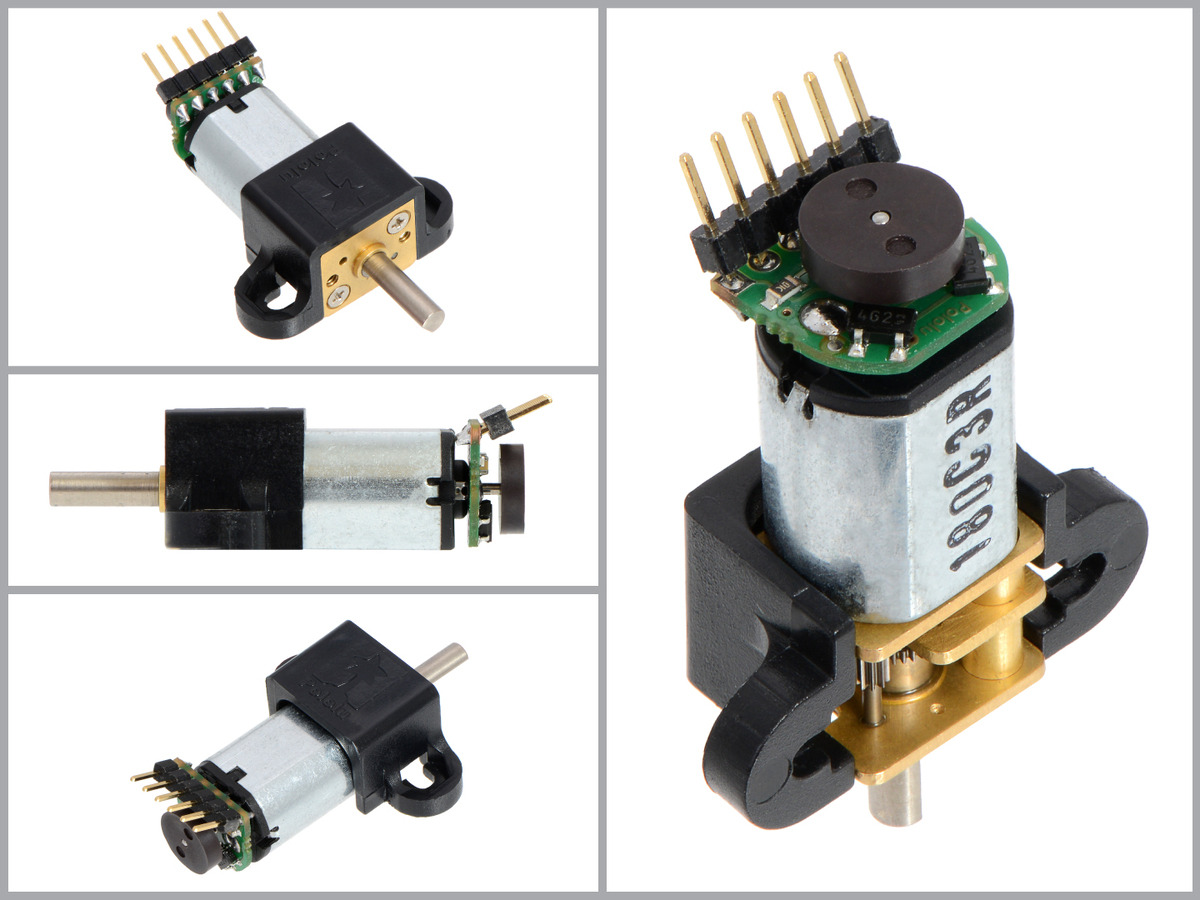
または、2mmピッチのコネクタをボードにはんだ付けすることもできます。次の例は、オスヘッダーを示しています。これにより、6ピンの2mmピッチのメスヘッダーで終端する取り外し可能なケーブルを作成できます。下の図に示すように、ピンがモーターの上に傾いている場合、ピンはボードの穴からかろうじて突き出ています。この向きでは、拡張マイクロメタルギアモーターブラケットを使用している場合でも、メスヘッダーを差し込む余地があることに注意してください。
 |
ピンがモーターから離れた方向を向いている場合は、磁気ディスクを十分に取り除くためにピンを傾ける必要があります。まともなはんだごてを使用すると、エンコーダーをモーターに取り付けた後でも、この向きではんだ付けできます。
 |
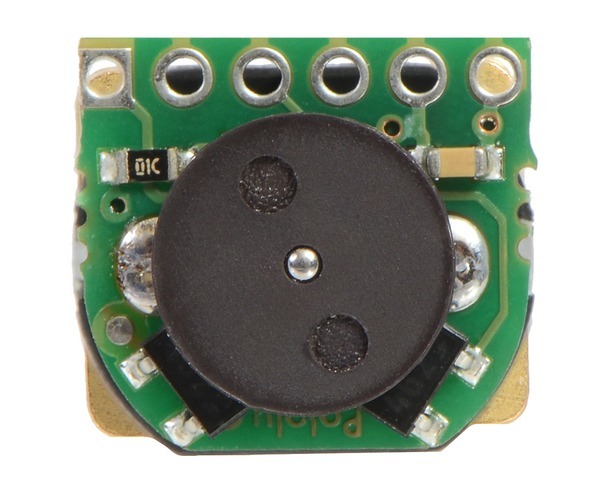
ボードがモーターにはんだ付けされると、磁気エンコーダーディスクをモーターシャフトに押し込むことができます。これを実現する簡単な方法の1つは、モーターがディスクに平らな面にあるときにモーターをディスクに押し付け、シャフトがその面に接触するまで押します。モーターディスクが少なくともディスクを貫通している限り、エンコーダーディスクとセンサーボードの間のギャップのサイズは、パフォーマンスに大きな影響を与えません。
回路図
 |
この回路図は、ダウンロード可能なpdf(125k pdf)としても入手できます。