
Optical Encoder Pair Kit for Micro Metal Gearmotors, 3.3V [pololu-2591]




販売価格: 2,180円(税別)
(税込: 2,398円)
商品詳細
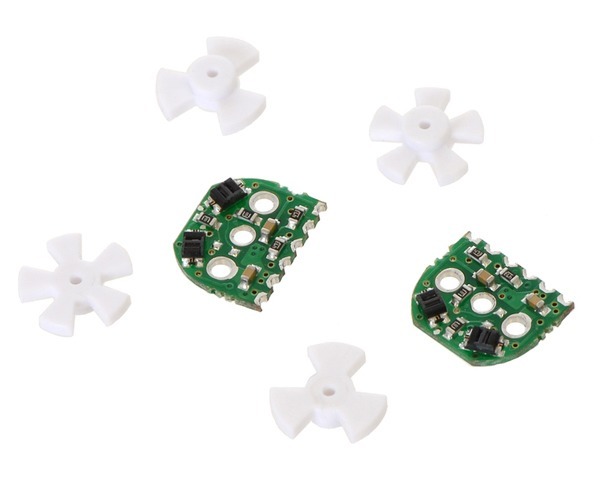
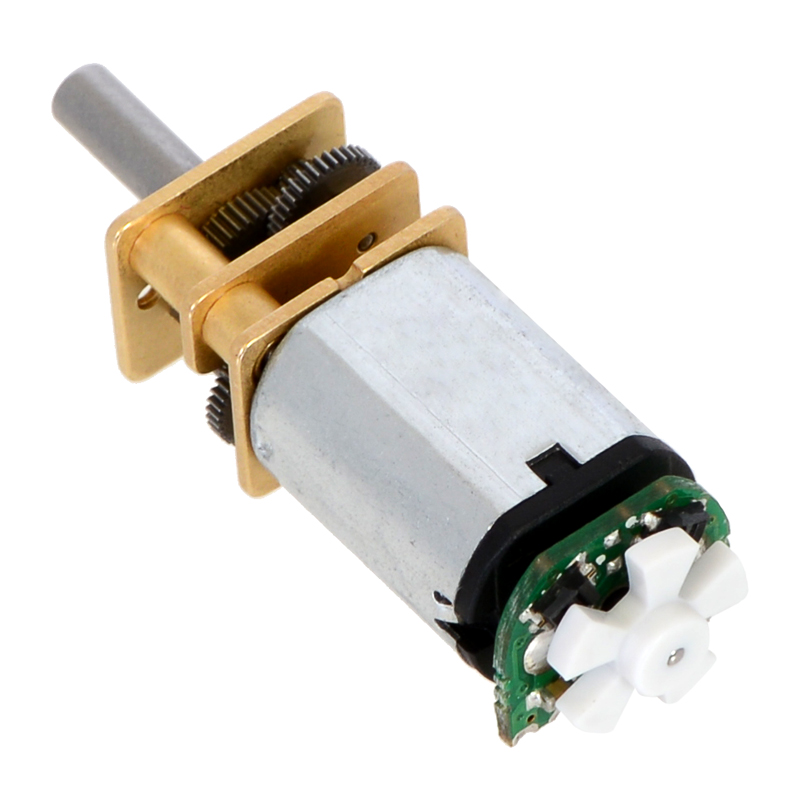
本セットには、センサーボードと反射ホイールが含まれており、バックシャフトが延長された2つのマイクロメタルギアモーターに直角位相エンコーディングを追加します(モーターはこのキットには含まれていません)。3歯および5歯のエンコーダーホイールが含まれ、モーターシャフトの1回転あたり12カウントおよび20カウントのオプションを提供します(ギアボックス出力の1回転あたりのエンコーダーカウントを計算し、ギア比を掛けます)。
注:このセンサーシステムは、物理的なエンコーダーの設置と結果の信号の使用に慣れている比較的上級者向けです。バックシャフトが延長されたマイクロメタルギアモーターでのみ機能します。
|
|
ピン配置とインストール
エンコーダボードは、モーターの背面に直接はんだ付けするように設計されており、モーターの背面シャフトが回路基板の中央にある穴から突き出ています。ボードの位置が合うほど、出力信号の品質が向上します。良好な配置を実現する1つの方法は、ボードを1つのモーターピンに固定し、ボードが正しく配置されている場合にのみ、もう1つのピンをはんだ付けすることです。モーターのプラスチック製エンドキャップまたはモーターブラシが変形する可能性がある、モーターピンの長時間の加熱に注意してください。ボードが2つの端子にはんだ付けされると、モーターのリード線がセンサーの電源と2つの直交出力とともに、ボードの端に沿ってM1およびM2パッドに接続されます。
|
|
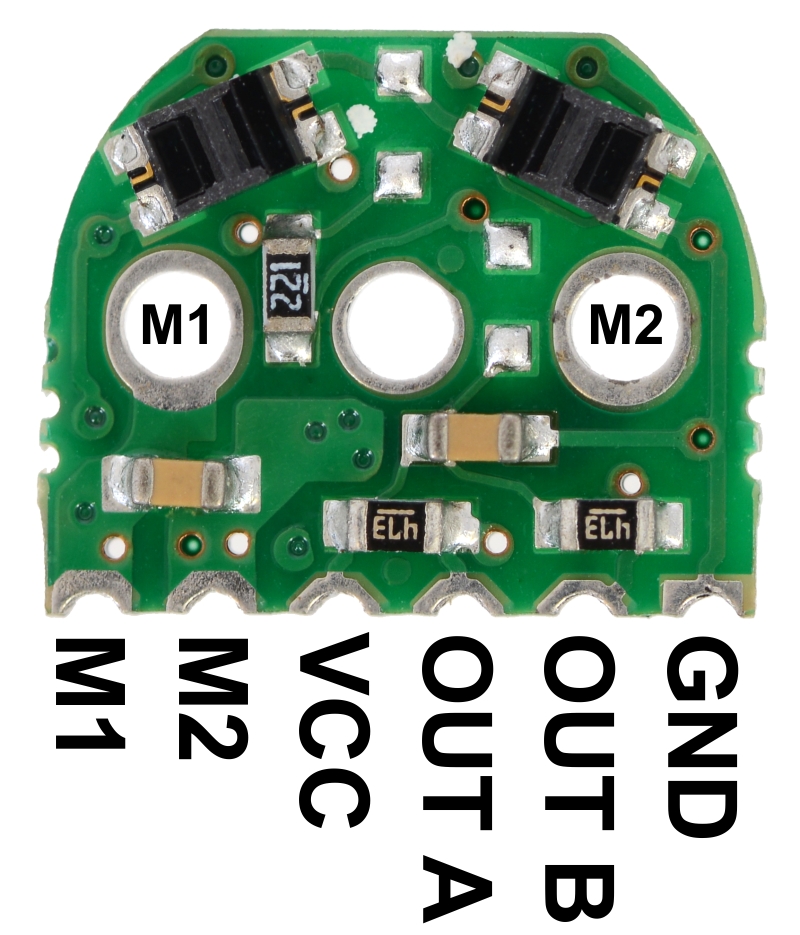
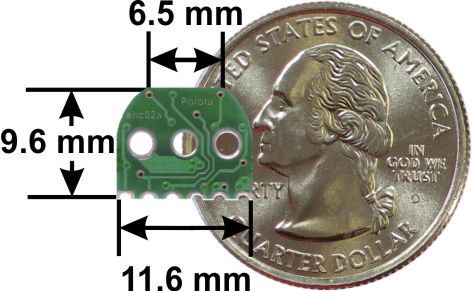
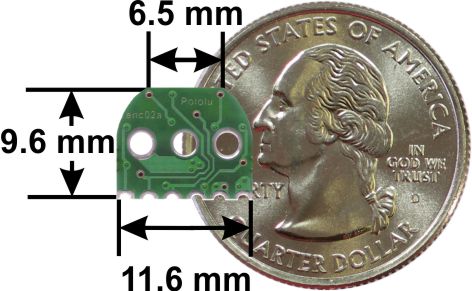
エッジ接続は2 mmピッチです。ボードは、次の図に示すように、別のPCB、2 mmコネクタ、または個々のワイヤに垂直にはんだ付けできます。
 |
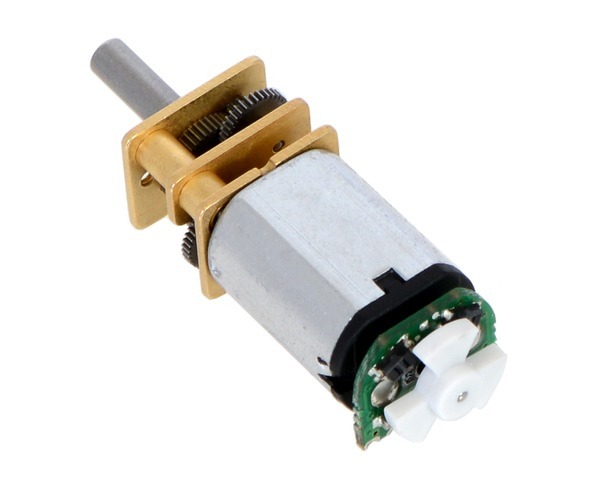
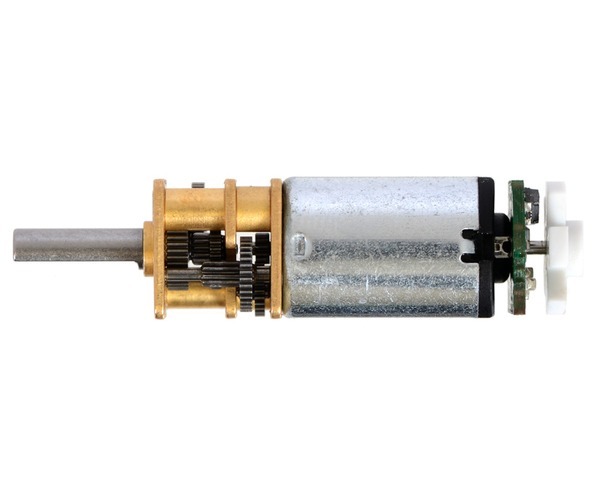
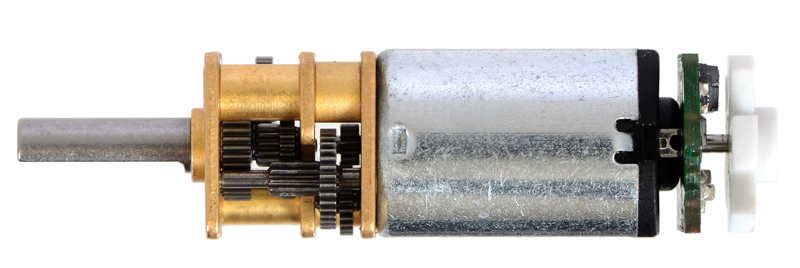
取り付けられたマイクロメタルギアモーター反射光学エンコーダーの例。 |
|---|
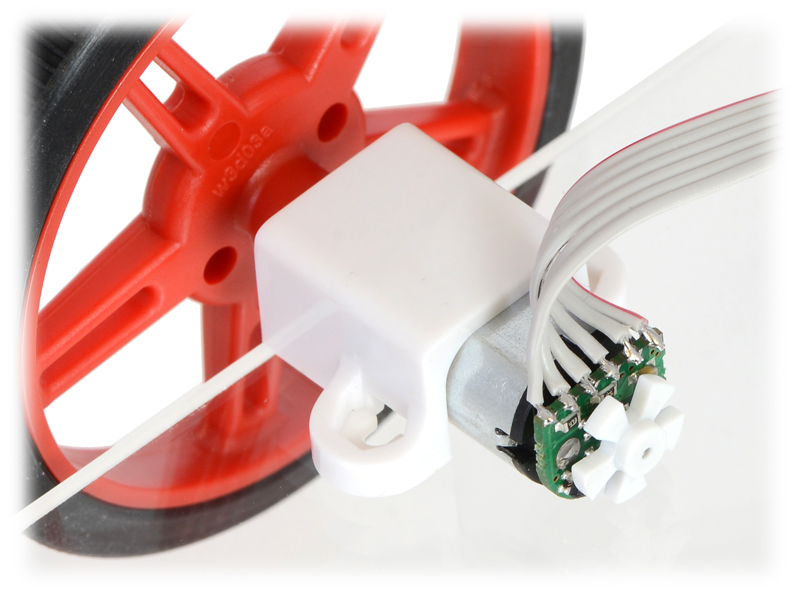
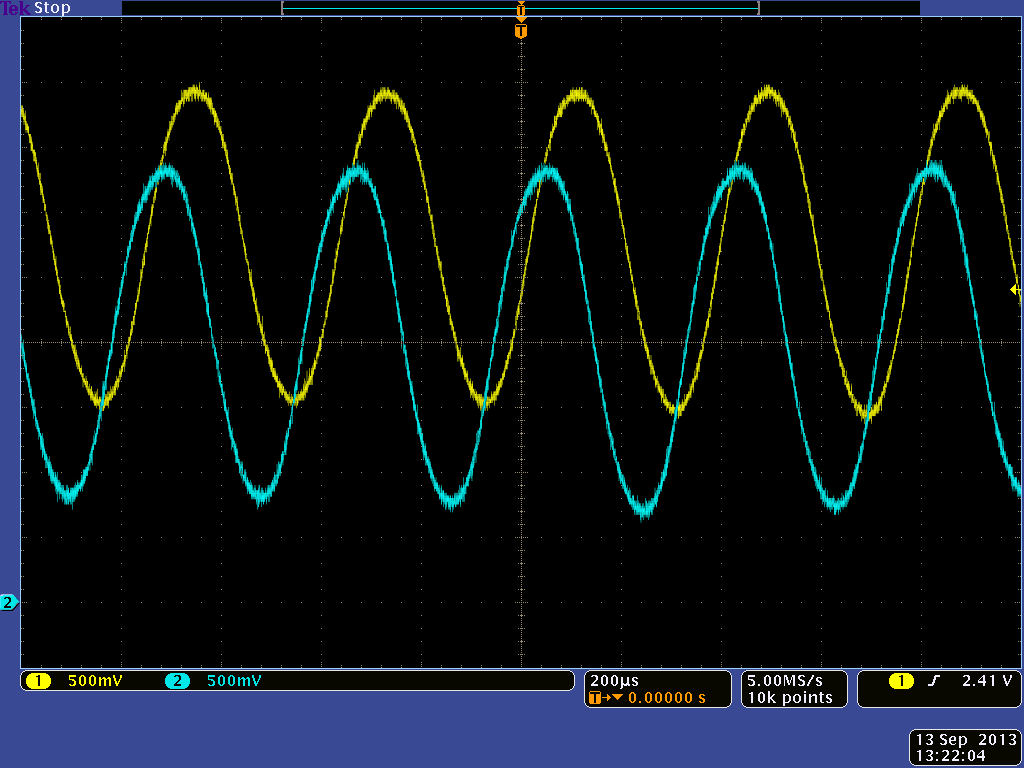
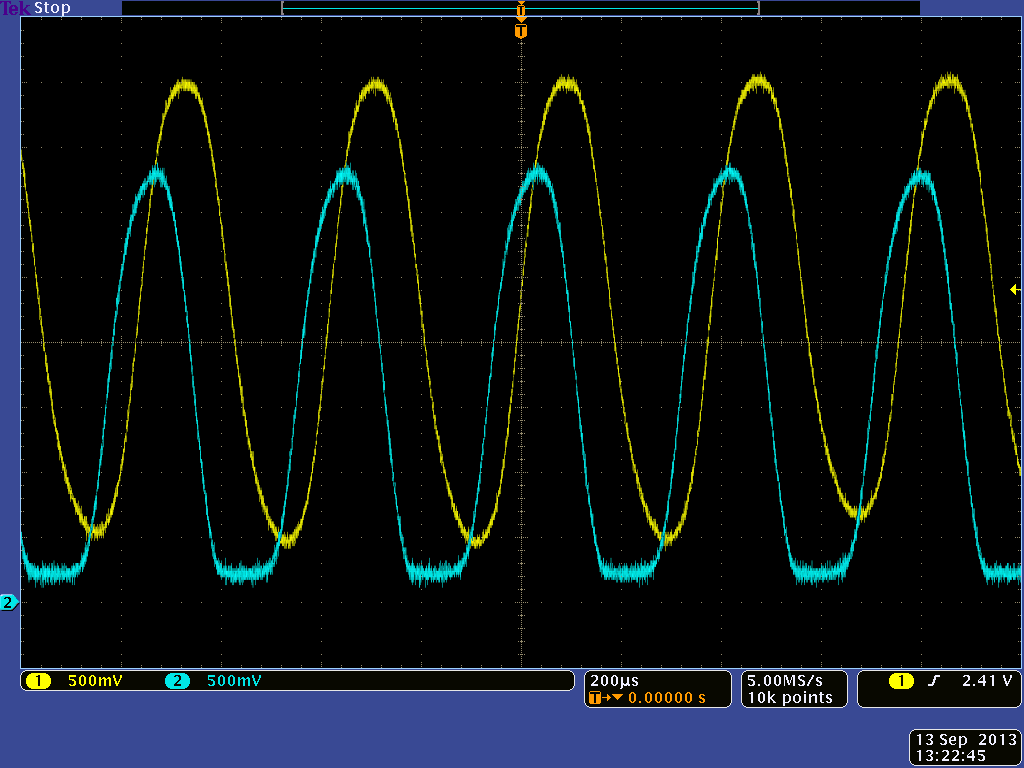
ボードがモーターにはんだ付けされると、プラスチック製のエンコーダーホイールをモーターシャフトに押し込むことができます。エンコーダーホイールは、ホイールとセンサーの間のギャップが約0.5 mmになるように十分に押し込む必要があります。ギャップを一定にする方法の1つは、エンコーダーホイールを取り付けるときに、数枚の紙または名刺をシムとして使用することです。エンコーダーホイールの最適な配置を確認する最良の方法は、オシロスコープで信号を確認することです。次の一連のスクリーンキャプチャは、ホイールがセンサーに近づいていくにつれて、約30,000 RPMで回転する5歯のホイールの出力を示しています。
|
|
 |
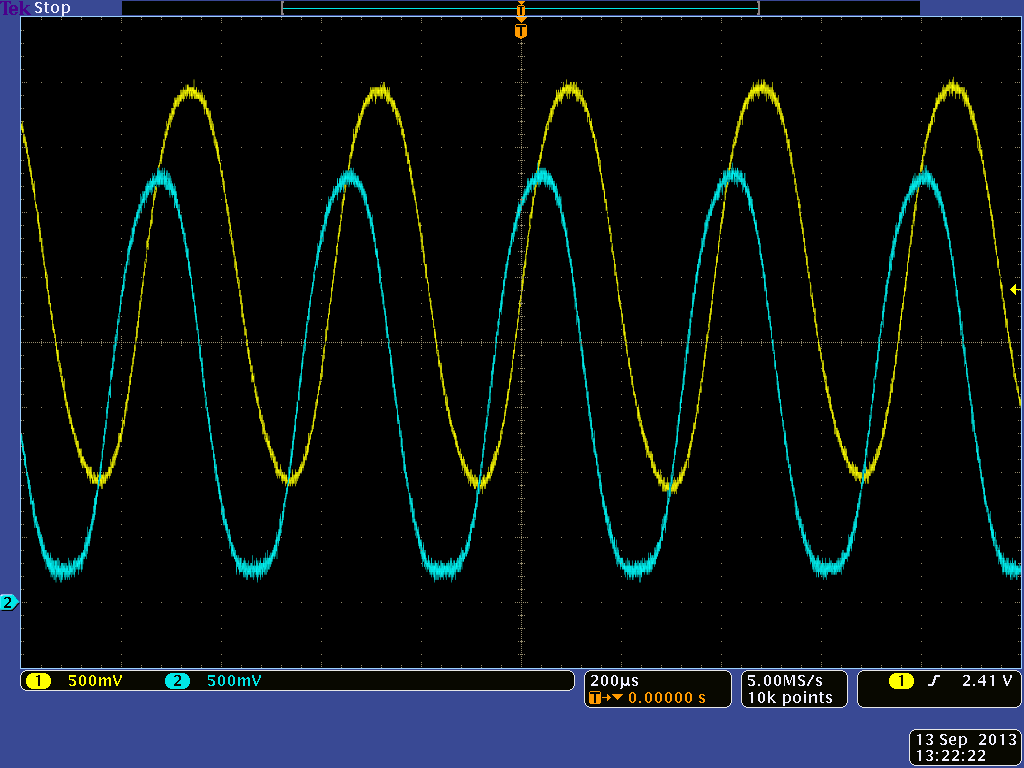
5Vエンコーダバージョン、モーター約 30k RPM:センサーから最適な距離にある5歯のホイール。 |
|---|
|
|
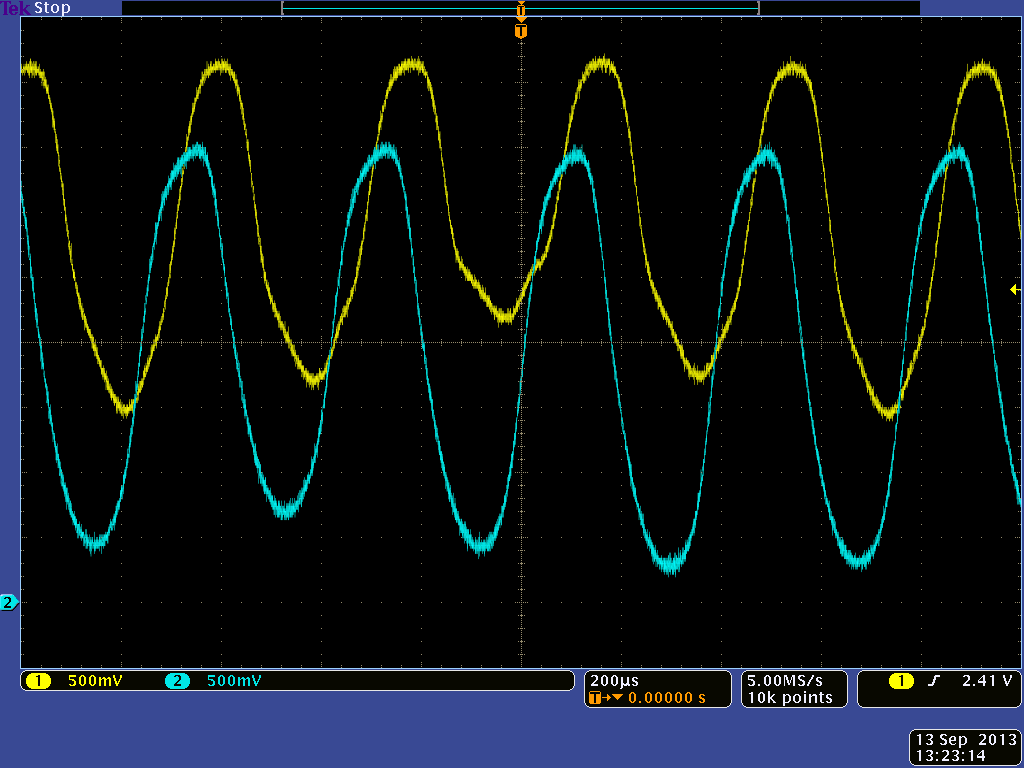

上記の中央オシロスコープのキャプチャは、センサーから最適な距離にホイールを取り付けた場合の信号出力の様子を示しています。この最適な場合でも、2つの反射センサーの固有のばらつきにより、2つのチャネルからの信号は異なりますが、どちらの信号も位相が90°ずれており、どちらも広い電圧範囲に及びます。
適切な信号調整(ヒステリシスを備えたコンパレータなど)を使用すると、おそらく最後のケースを除いて、すべての出力で信頼できる位置カウントが得られます。また、出力は低速で3歯ホイールを使用すると改善する傾向があります。
5Vおよび3.3Vバージョン
エンコーダボードには、5.0 Vと3.3 Vでの動作に最適化された2つのバージョンがあります。唯一の違いは、反射率センサーのIR LEDの電気構成です。
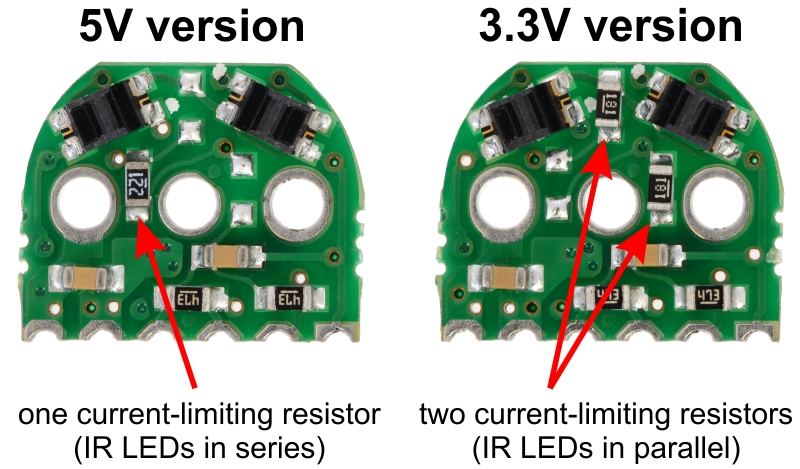 |
LEDが直列に接続された5 Vバージョンは、約12 mAを消費します。LEDが並列に接続された3.3 Vバージョンは、約24 mAを消費します。
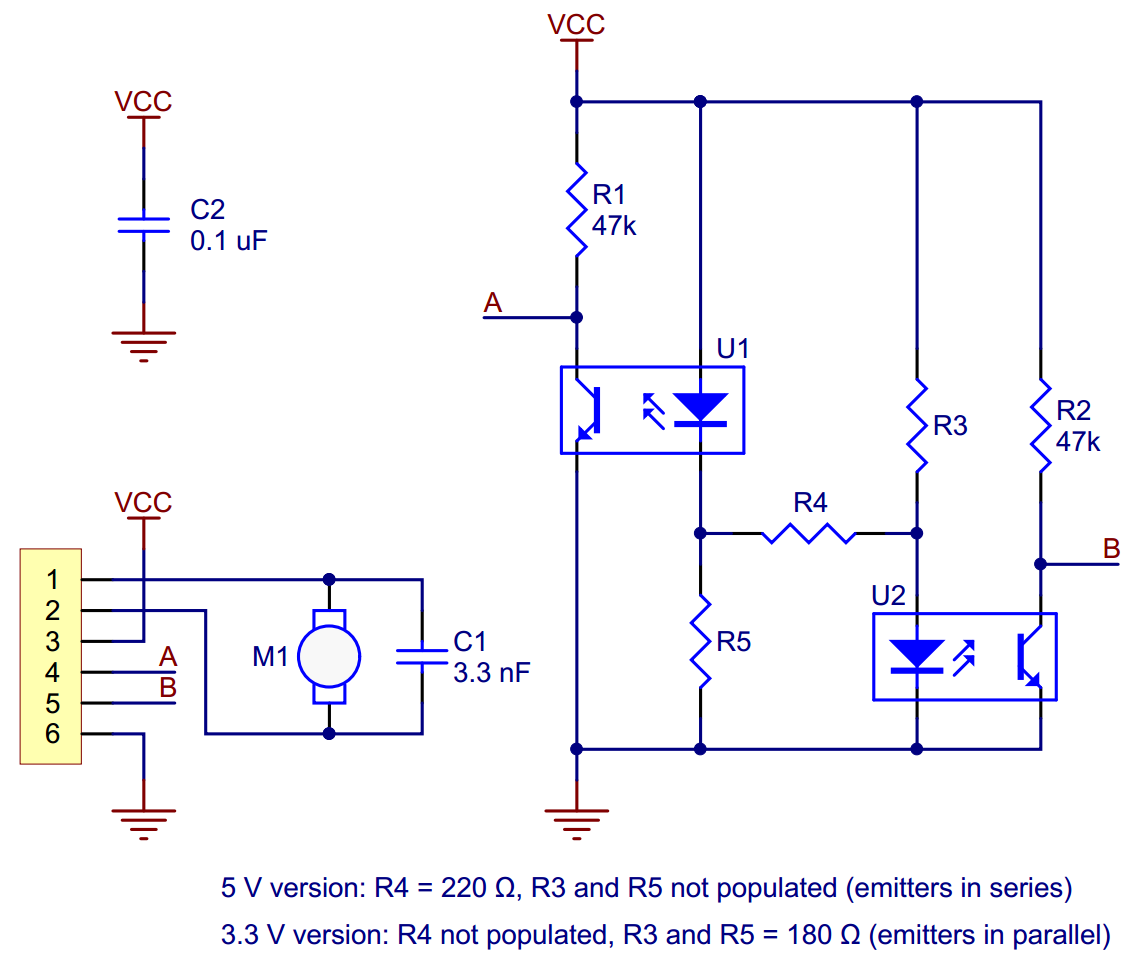 |
マイクロメタルギアモーター反射光学エンコーダーの概略図。 |
|---|
この回路図は、ダウンロード可能なpdf(145k pdf)としても入手できます。
注:これらの光学式エンコーダーよりも、マイクロメタルギアモーター用の新しい磁気エンコーダーペアキットを強くお勧めします。磁気エンコーダーは周囲の干渉を受けにくく、ヒステリシスが組み込まれたよりクリーンな信号を備えているため、マイクロコントローラーやその他のデジタル回路に直接接続できます。逆に、光学エンコーダの出力は直接フォトトランジスタ出力であるため、センサーと信号を処理するデジタルシステムとの間で信号調整が必要になることがよくあります。
また、このエンコーダーはPololu社のHPCBマイクロメタルギアモーター(HPCBモーター端子が大きすぎて対応するPCBの穴に収まらない)と互換性がありませんが、マイクロメタルギアモーターのLP、MPおよびHPバージョンと互換性があります。