
DRV8833 Dual Motor Driver Carrier [pololu-2130]




販売価格: 1,980円(税別)
(税込: 2,178円)
商品詳細
Texas InstrumentsのDRV8833は、2.7 V〜10.8 Vで2つのブラシ付きDCモーターの双方向制御に使用できるデュアルHブリッジモータードライバーICです。チャネルあたり最大約1.2Aを連続的に供給でき、最大電流に耐えることができます。チャンネルあたり2Aで数秒間、比較的低電圧で動作する小型モーターに最適なドライバーです。このボードはDRV8833のキャリアであるため、DRV8833のデータシートをよくお読みください。ボードには、DRV8833などのSMDコンポーネントが搭載されて出荷され、逆バッテリ保護用のFETが追加されています。
このボードは、動作電圧範囲と連続電流定格がDRV8835デュアルモータードライバーキャリアと非常に似ていますが、DRV8835の最小動作電圧は低く、追加の制御インターフェイスモードを提供し、各次元で0.1インチ小さくなっています。また、Arduinoで使いやすいDRV8835デュアルモータードライバーシールドも搭載しています。DRV8833は、より高いピーク電流定格(チャネルあたり2A対1.5A)、オプションの内蔵電流制限を備えており、外部から供給されるロジック電圧は必要ありません。
特徴
- デュアルHブリッジモータードライバー:2つのDCモーターまたは1つのバイポーラステッピングモーターを駆動できます
- 動作電圧:2.7V〜10.8 V
- 出力電流:モーターあたり1.2 A連続(2 Aピーク)
- モーター出力を並列化して、単一のモーターに2.4 Aの連続(4 Aピーク)を供給可能
- 入力は3Vおよび5V互換
- 低電圧ロックアウトと過電流および過熱に対する保護
- 逆電圧保護回路
- センス抵抗(本製品には含まれていません)を追加することで電流制限を有効にできます
モータードライバー使用時
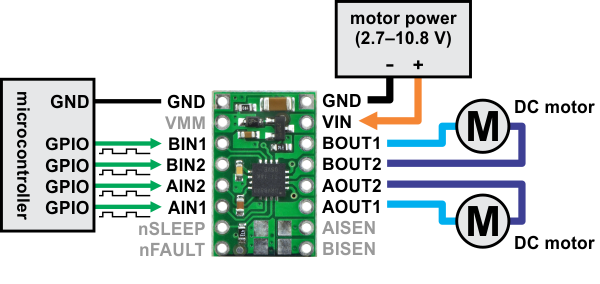 |
マイクロコントローラをDRV8833デュアルモータードライバキャリアに接続する最小限の配線図。 |
|---|
一般的なアプリケーションでは、電源接続はボードの片側で行われ、制御接続は反対側で行われます。nSLEEPピンはボード上でハイにプルされており、DRV8833の低電力スリープモードを使用したくない場合は切断したままにしておくことができます。2つのモーターチャネルのそれぞれには、対応する出力xOUT1とxOUT2の状態を設定する1対の制御入力xIN1とxIN2があります。パルス幅変調(PWM)信号は、これらの各入力に適用できます。制御入力は内部でローに引き下げられ、デフォルトでモータードライバー出力を効果的に無効にします。入力がドライバ出力にどのように影響するかについての詳細は、DRV8833データシートの真理値表を参照してください。
nFAULTピンは、過電流、過熱、または低電圧状態が発生するたびにチップによってローに駆動されるオープンドレイン出力です。それ以外の場合はフローティング状態のままなので、ドライバーの障害状態を監視する場合は、外部プルアップ抵抗を接続する必要があります(または、組み込みのプルアップが有効になっているマイクロコントローラー入力を使用します)。
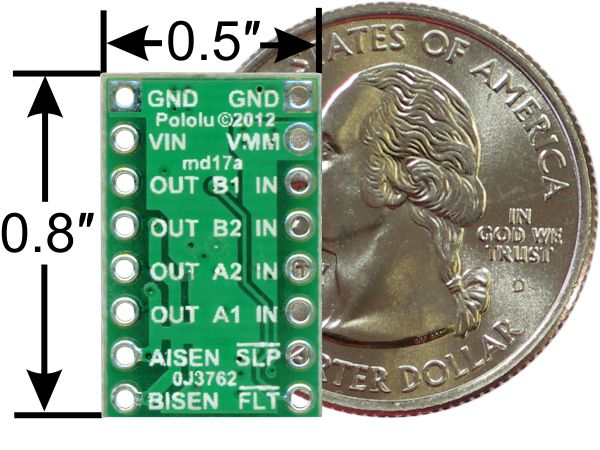
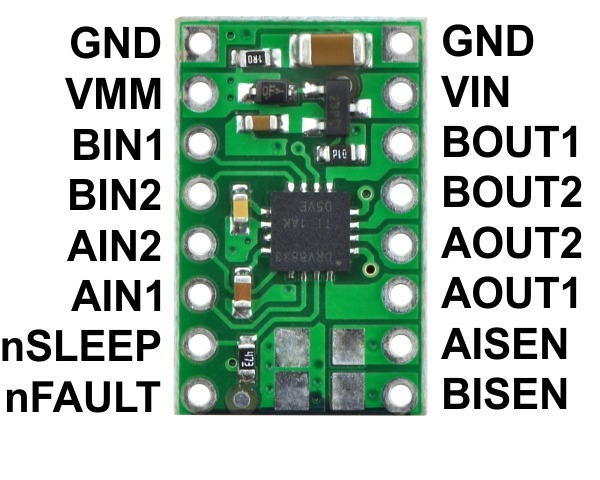
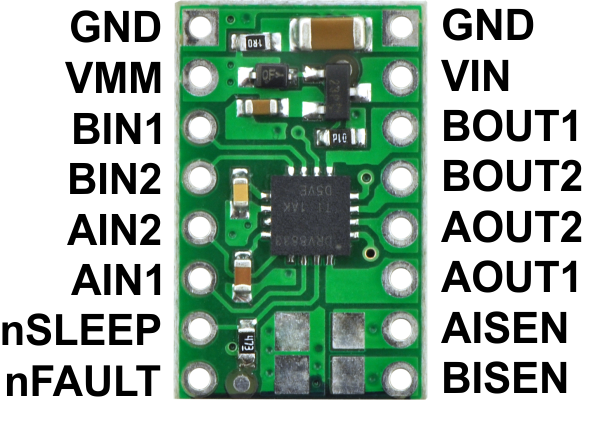
ピン配置
 |
| ピン | デフォルト状態 | 説明 |
|---|---|---|
| VIN | 逆保護された2.7V〜10.8Vのモーター電源接続。VINが5V未満で動作すると、最大電流出力がわずかに減少します。 | |
| VMM | このピンは、逆電圧保護MOSFETの後のモーター電源へのアクセスを提供します(以下のボード回路図を参照)。これは、システム内の他のコンポーネントに逆保護された電力を供給するために使用できます。通常は出力として使用しますが、ボード電源の供給にも使用できます。 | |
| GND | モーター電源と制御接地基準の接地接続ポイント。 制御源とモータードライバーは共通のアースを共有する必要があります。 | |
| AOUT1 | モーターAハーフブリッジ1出力。 | |
| AOUT2 | モーターAハーフブリッジ2出力。 | |
| BOUT1 | モーターBハーフブリッジ1出力。 | |
| BOUT2 | モーターBハーフブリッジ2出力。 | |
| AIN1 | LOW | モーターチャネルAの論理入力制御。PWMをこのピンに適用できます。 |
| AIN2 | LOW | モーターチャネルAの論理入力制御。PWMをこのピンに適用できます。 |
| BIN1 | LOW | モーターチャネルBの論理入力制御。PWMをこのピンに適用できます。 |
| BIN2 | LOW | モーターチャネルBの論理入力制御。PWMをこのピンに適用できます。 |
| nSLEEP | 高い | スリープ入力:このピンがローに駆動されると、チップは低電力スリープモードに入ります。(ボードシルクスクリーンにSLPのラベルが付いています。) |
| nFAULT | 浮く | 障害出力:過電流、過熱、または低電圧状態の場合にローに駆動されます。それ以外の場合はフローティング。(ボードシルクスクリーンにFLTのラベルが付いています。) |
| アイゼン | モーターAの電流検出ピン。このピンはアースに接続されており、デフォルトでは機能しませんが、以下に説明する変更を加えることで電流制限を有効にできます。 | |
| BISEN | モーターBの電流検出ピン。このピンはアースに接続されており、デフォルトでは機能しませんが、以下に説明する変更を加えることで電流制限を有効にできます。 |
電流制限
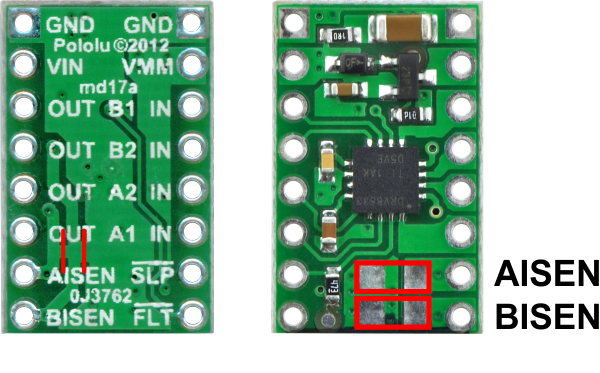
DRV8833は、固定周波数PWM電流レギュレーション(電流チョッピング)を使用して、モーターを流れる電流をアクティブに制限できます。デフォルトでは、このキャリアボードは電流検出ピンをグランドに接続し、電流制限機能を無効にします。電流制限を有効にするには、下の画像に示すように、ナイフを使用してボードの背面のブレークポイントをカットし、適切な電流検出抵抗を前面の未実装パッドにはんだ付けします。パッドは、1206個の表面実装抵抗器用のサイズになっています。抵抗値がチョッピング電流を決定する方法については、DRV8833のデータシートを参照してください。
 |
実際の消費電力に関する考慮事項
DRV8833のデータシートでは、モーターチャネルあたり最大連続電流1.5Aを推奨しています。ただし、チップ自体は低電流で過熱します。たとえば、強制空気流のない室温でのテストでは、チップの熱保護が作動してモーター出力を無効にする前に、チップはチャネルあたり1.5 Aを約1分間供給できましたが、連続電流は1.2– 1.3チャネルあたりのAは、サーマルシャットダウンをトリガーすることなく何分間も持続可能でした。供給できる実際の電流は、モータードライバーをどれだけ冷たく保つことができるかによって異なります。キャリアのプリント回路基板は、モータードライバーチップから熱を引き出すように設計されていますが、ヒートシンクを追加することでパフォーマンスを向上させることができます。テストは100%のデューティサイクルで実施されました。モーターをPWMすると、周波数に比例して追加の加熱が発生します。
この製品は、チップが過熱するかなり前から、火傷するほど熱くなる可能性があります。この製品および接続されている他のコンポーネントの取り扱いには注意してください。
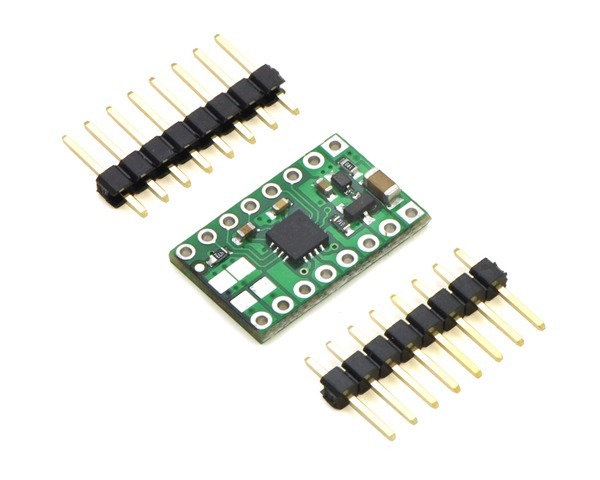
付属のハードウェア
|
|
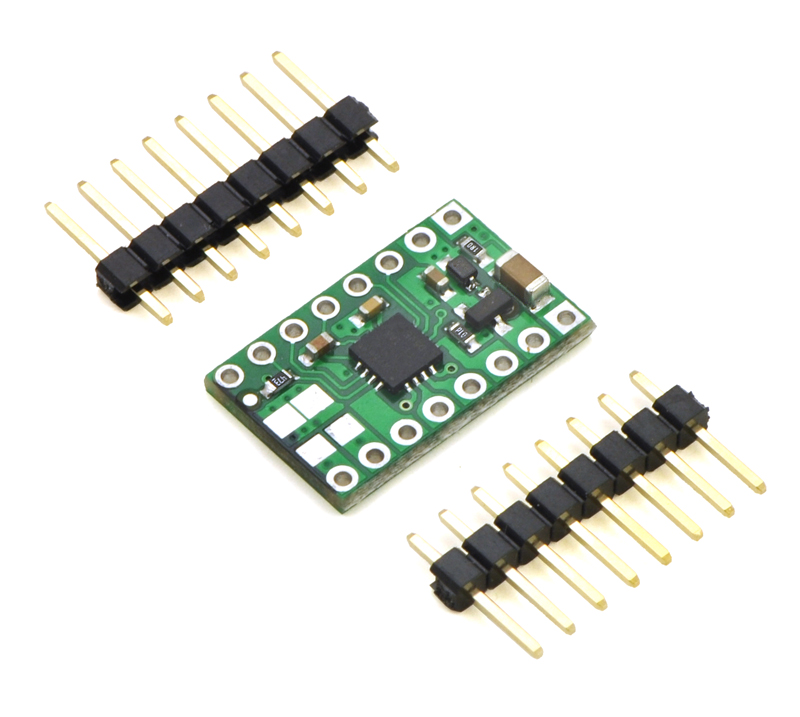
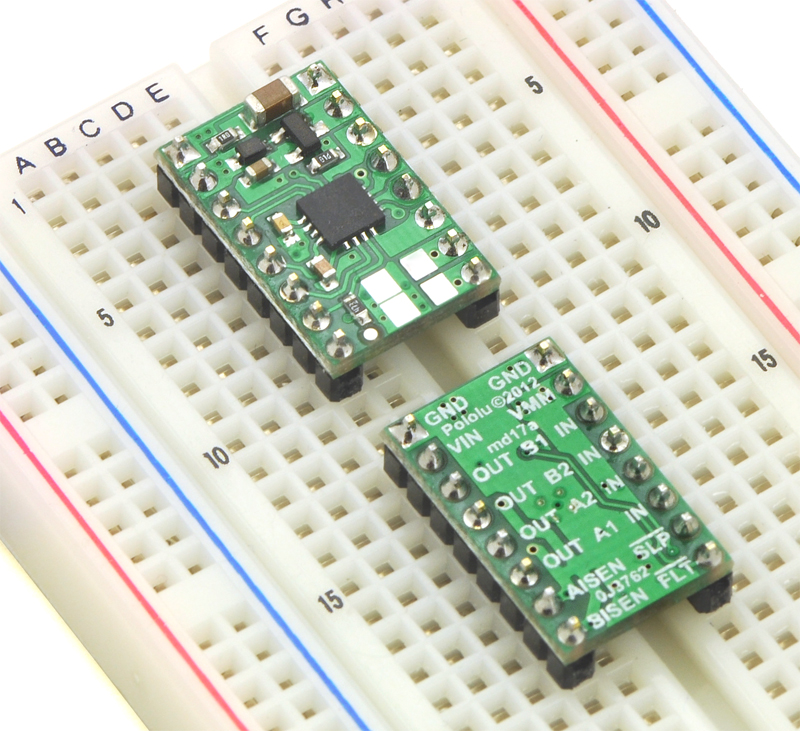
2つの1×8ピンブレークアウェイ0.1インチオスヘッダーがDRV8833デュアルモータードライバーキャリアに含まれています。これは、はんだ付けして、パフォーマンスボード、ブレッドボード、または0.1インチメスコネクタでドライバーを使用できます。(ヘッダーは、半分に壊すことができる単一の1×16ピースとして出荷される場合があります。)上の右の図は、これらのヘッダーピン(パーツが表示またはシルクスクリーンが表示)と一緒に使用した場合の2つの可能なボードの向きを示しています。モーターリードやその他の接続をボードに直接はんだ付けすることもできます。
回路図
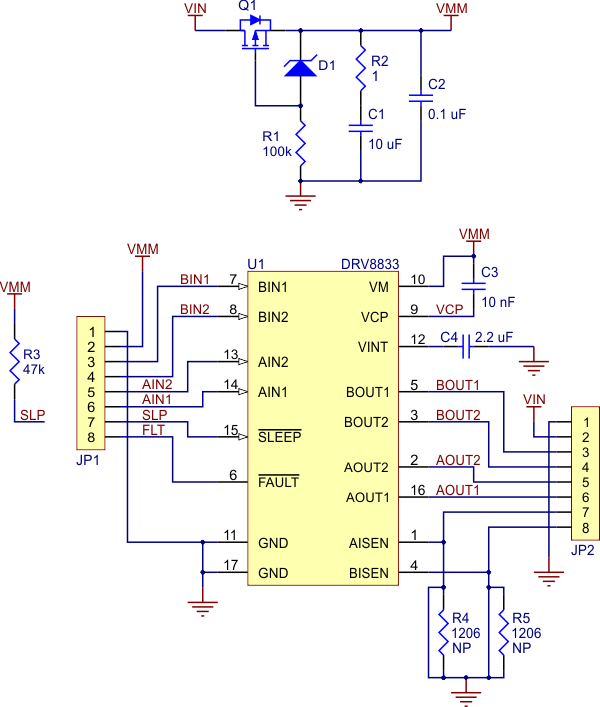 |
DRV8833デュアルモータードライバーキャリアの概略図 |
|---|