
DOBOT CR12 [dobot-cr12-001]
商品詳細
DOBOT CR12
多関節ロボットアーム(協働ロボット)
DOBOT CR12は、協働ロボットとして安全性の高い操作インターフェースなどが搭載されたDOBOT CRシリーズの中で、最もコンパクトな6軸ロボットアームです。
主なスペック
❑ ペイロード :12.0kg
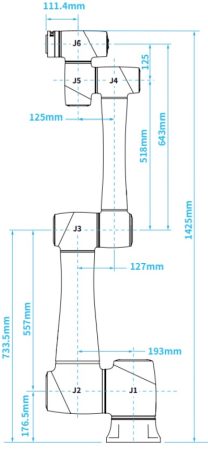
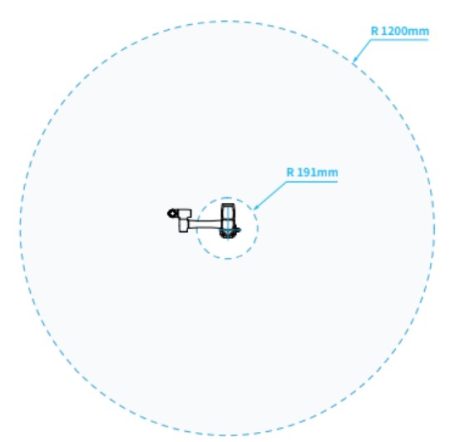
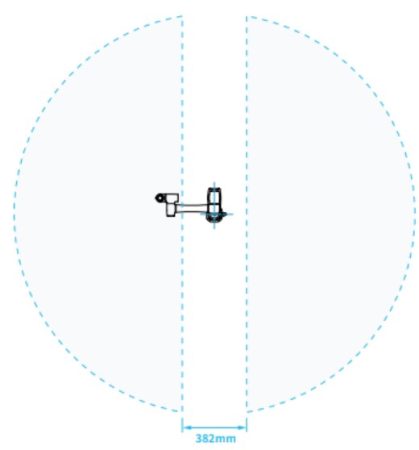
❑ 最大リーチ :1,425mm
❑ 繰返し精度 :0.03mm
❑ 最大速度 :4m/sec
-主な特徴
1. ワンハンドティーチングと非接触の衝突検知
安全なオペレーションの確保と作業点を素早く展開するため、ワンハンドティーチングの機能と衝突検知、さらに非接触の衝突検知機能で、安全停止及び衝突回避の機能を搭載しています。
2. 高い生産性の維持
最大稼働速度が大きく設定されており、比較的早い動きが可能です。
作業速度を早めに設定することで、生産性の改善に貢献できます。
3. 多様な活用方法の可能性
DOBOT CR10は、可搬重量が10.0Kgに設定されたロボットアームです。用途としては、物流現場での重荷物の入れ替え作業や、工場における大規模な出荷業務など様々な活用方法が考えられます。
スペックの詳細
| 6軸協働ロボット | DOBOT CR10 | |
| ペイロード | 12kg | |
| 最大リーチ | 1,425mm | |
| 重量 | 39.5kg | |
| TCPの最大速度 | 4m/s | |
関節動作範囲 | J1,2,4,5,6 軸 | ± 360° |
| J3 | ± 160° | |
| 関節最高速度 | J1,2 | 120° /s |
| J3,4,5,6 | 180° /s | |
エンドエフェクタの I/O インタフェース | DI / DO / AI | 2 |
| AO | 0 | |
| エンドエフェクタの通信インタフェース | RS485 | |
| コントローラーの I/O インタフェース | DI | 16 |
| DO/DI | 16 | |
| AI/AO | 2 | |
| ABZ Incremental Encoder | 1 | |
| 繰り返し精度 | ± 0.03mm | |
| 通信インターフェイス | TCP/IP , Modbus TCP , EtherCAT , Wi-Fi | |
| IP規格 | IP54 | |
| 作業環境 | 0℃ -45℃ | |
| 消費電力 | 350W | |
| 電源 | 100-240V , 50-60Hz | |
<関連商品>
DOBOT CRシリーズのロボットアームは、現在12kg可搬のCR12の他に、3kg可搬のCR3、5kg可搬のCR5、7kg可搬のCR7、16kg可搬のCR16の4種類の大きさのロボットアームが選べます。
TechShareはDOBOT全製品を取り揃えた正規代理店でして、
弊社ショールーム [東陽町開発センター] にて、実機デモセミナーを定期的に開催しております。
AGVや四足歩行ロボット等もございますので、是非お気軽にお越しください!

本商品の詳細は、下記までお問合せください。
お問合せ先
TechShare株式会社
Physical Computing 事業部 DOBOTチーム
TEL 03-5683-7293 Email:dobot@techshare.co.jp

開催報告はこちら